Chin-Yi Cheng
2017
Origami Kinematics
Independent Research, Taipei, 2013
In this project, I developed a solid kinematic simulation system upon Rhino/Grasshopper/Python without using any existing folding algorithm and current simulation tool. I tried to research origami form topology to geometry to algorithm and to its mechanical behavior. This system can fold any shape of paper with reasonable crease. One interesting result is that, by controlling the density and angles of the creases, we are able to generate arc shape space under the folded paper. Another important discover is that, although in some cases we limited the degree of freedom to only one, the shape still can be fold in to extremely complex shape.


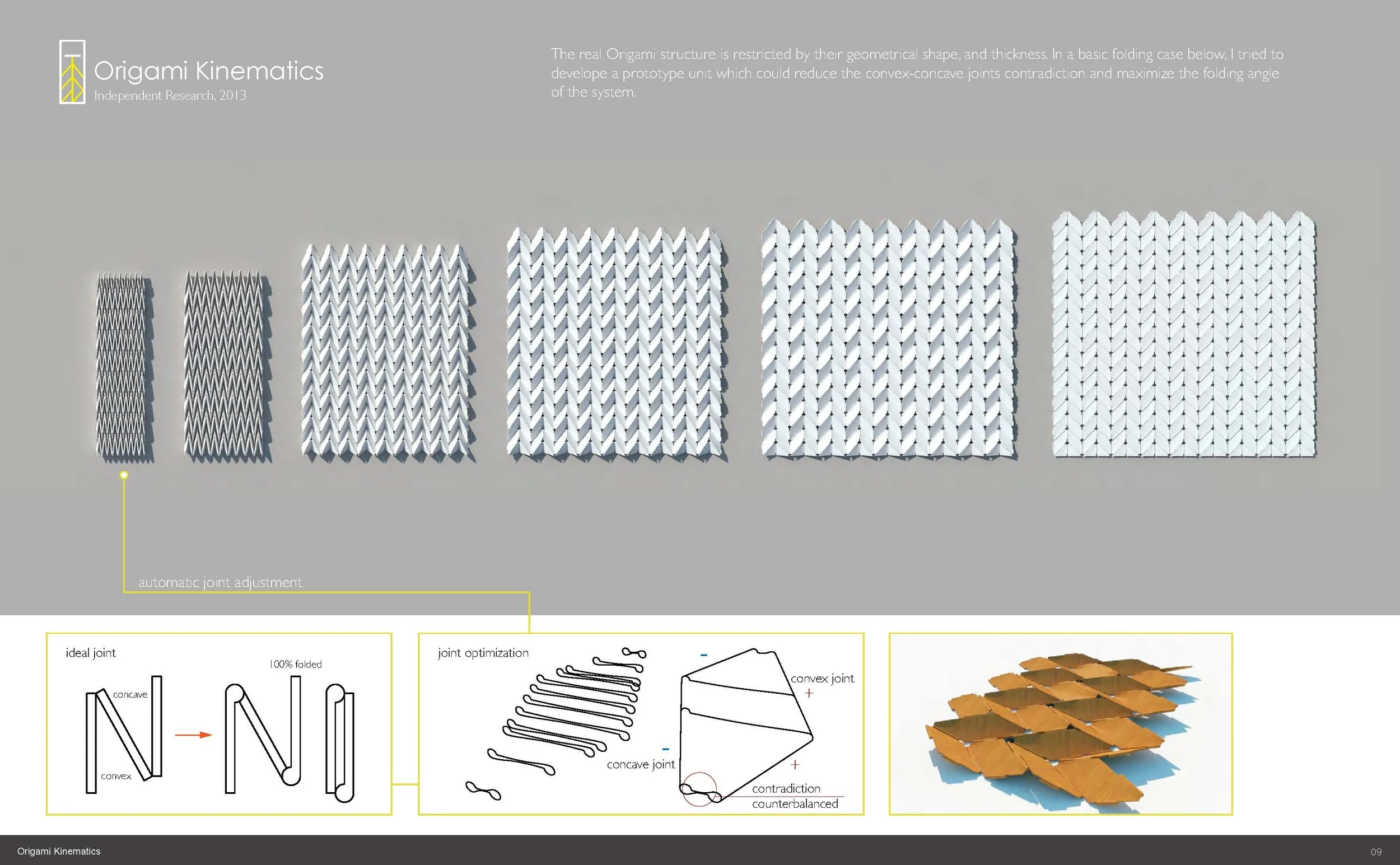
The real Origami structure is restricted by their geometrical shape, and thickness. In a basic folding case below, I tried to develope a prototype unit which could reduce the convex-concave joints contradiction and maximize the folding angle of the system.
Here is a demo of the system: